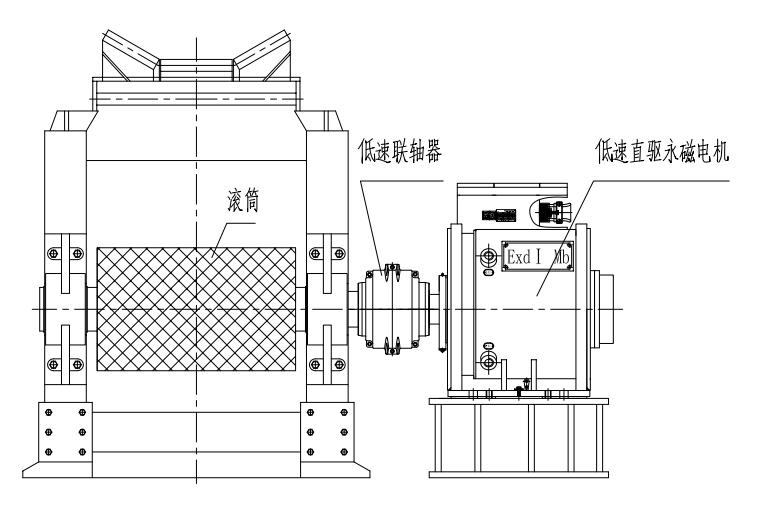
IE5 10000V TYZD ցածր արագությամբ ուղիղ փոխանցմամբ բեռներով մշտական մագնիսով սինխրոն շարժիչ

Արտադրանքի տեխնիկական բնութագրերը
| Գնահատված լարում | 10000 Վ |
| Հզորության տիրույթ | 200-1400 կՎտ |
| Արագություն | 0-300 պտ/րոպե |
| Հաճախականություն | Փոփոխական հաճախականություն |
| Փուլ | 3 |
| Բևեռներ | Տեխնիկական նախագծման միջոցով |
| Կադրերի միջակայք | 630-1000 |
| Մոնտաժ | B3, B35, V1, V3..... |
| Մեկուսացման աստիճան | H |
| Պաշտպանության աստիճան | IP55 |
| Աշխատանքային պարտականություն | S1 |
| Անհատականացված | Այո |
| Արտադրական ցիկլ | 30 օր |
| Ծագումը | Չինաստան |
Արտադրանքի առանձնահատկությունները
• Բարձր արդյունավետություն և հզորության գործակից։
• Մշտական մագնիսների գրգռում, գրգռման հոսանքի կարիք չունեն։
• Սինխրոն աշխատանք, արագության պուլսացիա չկա։
• Կարող է նախագծվել բարձր մեկնարկային պտտող մոմենտի և գերբեռնվածության հզորության համար։
• Ցածր աղմուկ, ջերմաստիճանի բարձրացում և թրթռում։
• Հուսալի շահագործում։
• Հաճախականության փոխարկիչով՝ փոփոխական արագության կիրառությունների համար։
Արտադրանքի կիրառություններ
Սերիայի արտադրանքը լայնորեն կիրառվում է տարբեր սարքավորումներում, ինչպիսիք են գնդիկավոր ջրաղացները, ժապավենային մեքենաները, խառնիչները, ուղիղ փոխանցմամբ յուղի պոմպային մեքենաները, մխոցային պոմպերը, սառեցման աշտարակային օդափոխիչները, ամբարձիչները և այլն՝ ածխահանքերում, հանքերում, մետալուրգիայում, էլեկտրաէներգիայում, քիմիական արդյունաբերությունում, շինանյութերի արդյունաբերության մեջ և այլ արդյունաբերական և հանքարդյունաբերական ձեռնարկություններում:




Հաճախակի տրվող հարցեր
Ինչպե՞ս են փոխարինվում կրողները։
Բոլոր մշտական մագնիսով սինխրոն ուղիղ փոխանցմամբ շարժիչները ունեն ռոտորի մասի համար հատուկ հենարանային կառուցվածք, և առանցքակալների տեղում փոխարինումը նույնն է, ինչ ասինխրոն շարժիչների դեպքում։ Հետագա առանցքակալների փոխարինումը և սպասարկումը կարող են խնայել լոգիստիկայի ծախսերը, խնայել սպասարկման ժամանակը և ավելի լավ պաշտպանել օգտագործողի արտադրության հուսալիությունը։
Որո՞նք են ուղիղ շարժիչի ընտրության հիմնական կետերը:
1. Տեղում աշխատանքային ռեժիմ՝
Օրինակ՝ բեռի տեսակը, շրջակա միջավայրի պայմանները, սառեցման պայմանները և այլն։
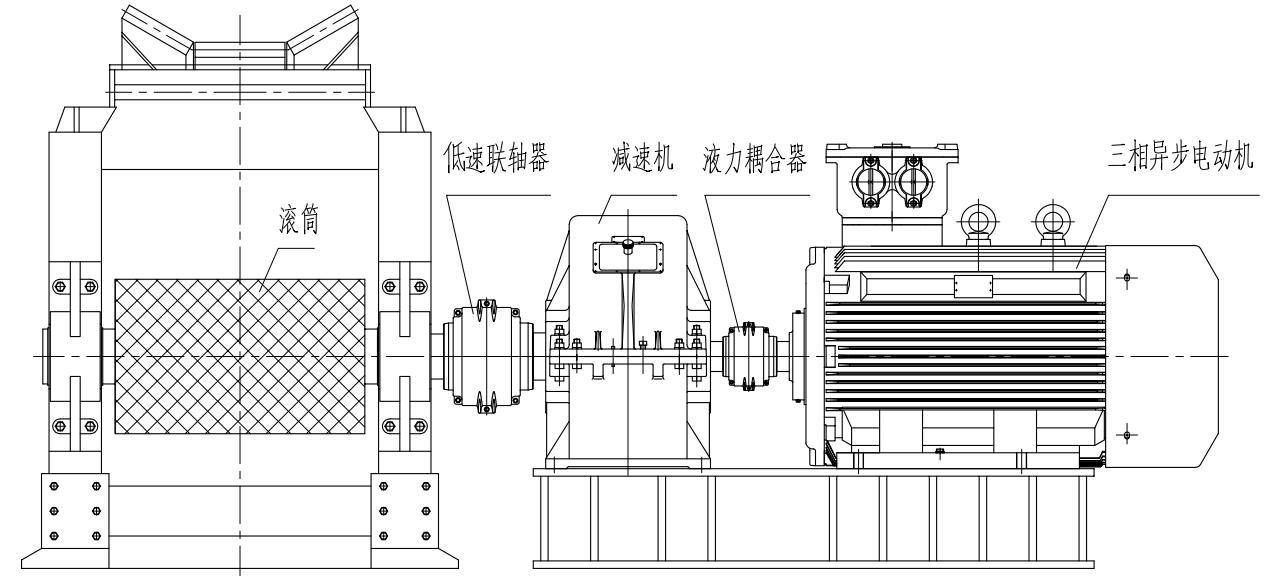
2. Փոխանցման մեխանիզմի սկզբնական կազմը և պարամետրերը.
Օրինակ՝ ռեդուկտորի անվանական ցուցանակի պարամետրերը, ինտերֆեյսի չափը, ատամնանիվների պարամետրերը, ինչպիսիք են ատամների հարաբերակցությունը և լիսեռի անցքը:
3. Վերանորոգման մտադրություն.
Մասնավորապես՝ ուղիղ, թե կիսաուղղակի փոխանցման դեպքում, քանի որ շարժիչի արագությունը չափազանց ցածր է, անհրաժեշտ է իրականացնել փակ ցիկլի կառավարում, և որոշ ինվերտորներ չեն աջակցում փակ ցիկլի կառավարմանը։ Բացի այդ, շարժիչի արդյունավետությունն ավելի ցածր է, մինչդեռ շարժիչի արժեքը բարձր է, ծախսարդյունավետությունը բարձր չէ։ Բարելավման առավելությունը հուսալիության և սպասարկման կարիք չունենալն է։
Եթե ծախսը և ծախսարդյունավետությունը ավելի կարևոր են, կան որոշ պայմաններ, երբ կիսաուղղակի փոխանցման լուծումը կարող է նպատակահարմար լինել՝ միաժամանակ ապահովելով սպասարկման կրճատում։
4. Պահանջարկի վերահսկում.
Արդյո՞ք ինվերտորի ապրանքանիշը պարտադիր է, արդյոք փակ ցիկլը պարտադիր է, արդյոք շարժիչի և ինվերտորի միջև կապի հեռավորությունը պետք է հագեցած լինի էլեկտրոնային կառավարման պահարանով, ինչ գործառույթներ պետք է ունենա էլեկտրոնային կառավարման պահարանը, և ինչ կապի ազդանշաններ են պահանջվում հեռակառավարվող DCS-ի համար։




