IE5 660-1140V TBVF պայթյունապաշտպան ցածր արագությամբ մշտական մագնիսով սինխրոն շարժիչ



Արտադրանքի տեխնիկական բնութագրերը
| EX-mark | EX db I Mb |
| Գնահատված լարում | 660,1140 Վ... |
| Հզորության տիրույթ | 37-1250 կՎտ |
| Արագություն | 0-300 պտ/րոպե |
| Հաճախականություն | Փոփոխական հաճախականություն |
| Փուլ | 3 |
| Բևեռներ | Տեխնիկական նախագծման միջոցով |
| Կադրերի միջակայք | 450-1000 |
| Մոնտաժ | B3, B35, V1, V3..... |
| Մեկուսացման աստիճան | H |
| Պաշտպանության աստիճան | IP55 |
| Աշխատանքային պարտականություն | S1 |
| Անհատականացված | Այո |
| Արտադրական ցիկլ | 30 օր |
| Ծագումը | Չինաստան |
Արտադրանքի առանձնահատկությունները
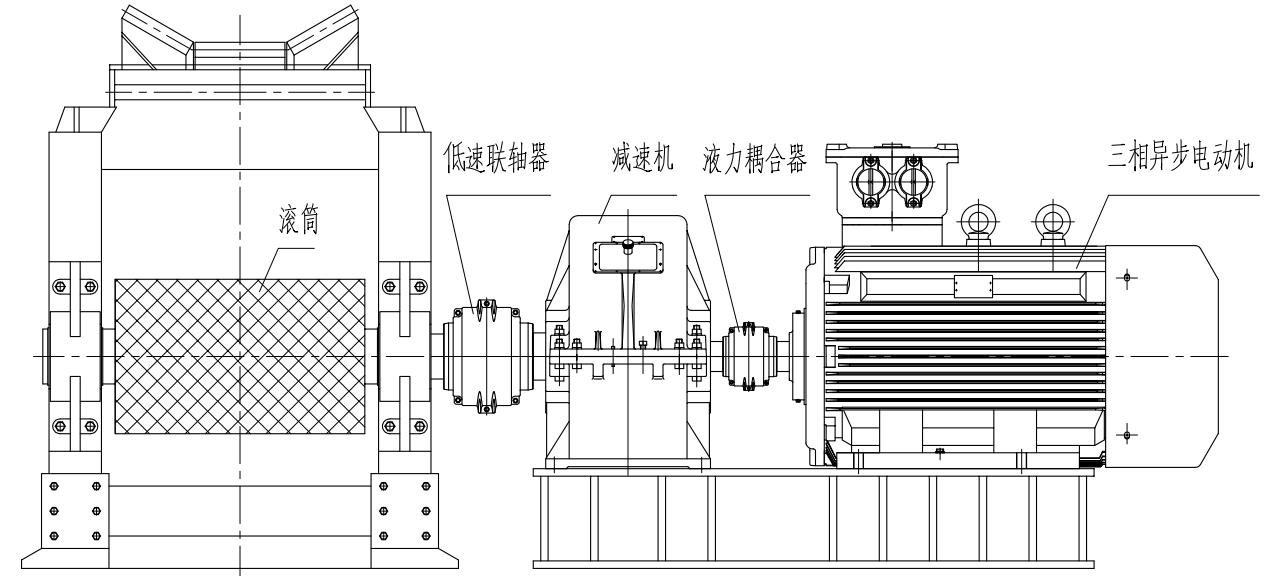
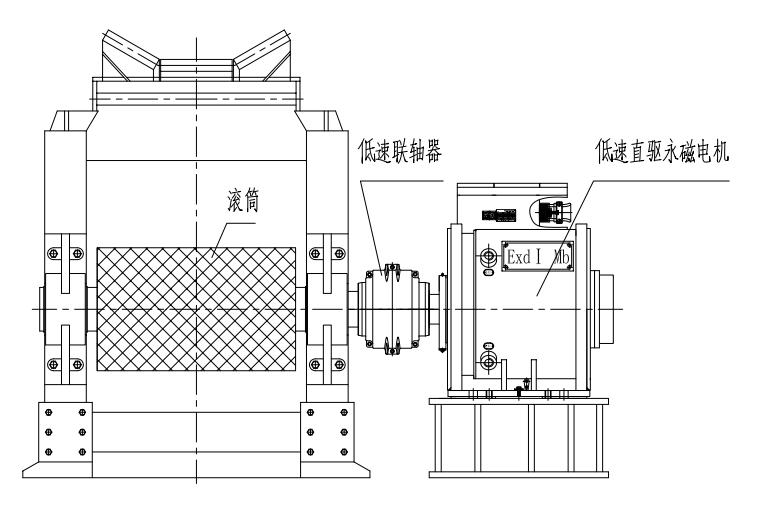
1. Հեռացրեք փոխանցման տուփը և հիդրավլիկ միացումը։ Կարճացրեք փոխանցման շղթան։ Յուղի արտահոսքի և վառելիքի լիցքավորման խնդիր չկա։ Մեխանիկական խափանումների ցածր մակարդակ։ Բարձր հուսալիություն։
2. Սարքավորմանը համապատասխան հարմարեցված էլեկտրամագնիսական և կառուցվածքային նախագծում, որը կարող է անմիջապես բավարարել բեռի համար անհրաժեշտ արագության և պտտող մոմենտի պահանջները։
3. Ցածր մեկնարկային հոսանք և ջերմաստիճանի ցածր բարձրացում։ Վերացնում է ապամագնիսացման ռիսկը։
4. վերացնում է փոխանցման տուփի և հիդրավլիկ միացման փոխանցման արդյունավետության կորուստը։ Համակարգն ունի բարձր արդյունավետություն, բարձր արդյունավետություն և էներգախնայողություն։ Պարզ կառուցվածք, ցածր շահագործման աղմուկ և ցածր օրական սպասարկման ծախսեր։
5. Ռոտորի մասն ունի հատուկ հենարանային կառուցվածք, որը հնարավորություն է տալիս տեղում փոխարինել կրողը, ինչը վերացնում է գործարան վերադառնալու համար անհրաժեշտ լոգիստիկ ծախսերը։
6. Մշտական մագնիսով սինխրոն շարժիչի ուղղակի փոխանցման համակարգի կիրառումը կարող է լուծել «մեծ ձիու կողմից փոքր սայլը քաշելու» խնդիրը, որը կարող է բավարարել սկզբնական համակարգի լայն բեռնվածության տիրույթի շահագործման պահանջը և բարելավել համակարգի ընդհանուր արդյունավետությունը՝ ապահովելով բարձր արդյունավետություն և էներգախնայողություն։
7. Կառավարեք վեկտորային հաճախականության փոխարկիչը։ Արագության միջակայքը 0-100% է, մեկնարկային աշխատանքը լավ է։ Կայուն աշխատանք։ Կարող է նվազեցնել համապատասխանության գործակիցը իրական բեռի հզորության հետ։
Արտադրանքի կիրառում
Այս ապրանքը կարող է ուղղորդել ածխահանքային սարքավորումները, որոնք լայնորեն օգտագործվում են ստորգետնյա տարածքում՝ տարբեր սարքավորումներ, ինչպիսիք են օդափոխիչները, պոմպերը և գոտիավոր մեքենաները, քարշ տալու համար։






Հաճախակի տրվող հարցեր
Որո՞նք են ցածր արագությամբ (rpm) շարժիչի ընտրության հիմնական կետերը:
1. Տեղում աշխատանքային ռեժիմ՝
Օրինակ՝ բեռի տեսակը, շրջակա միջավայրի պայմանները, սառեցման պայմանները և այլն։
2. Փոխանցման մեխանիզմի սկզբնական կազմը և պարամետրերը.
Օրինակ՝ ռեդուկտորի անվանական ցուցանակի պարամետրերը, ինտերֆեյսի չափը, ատամնանիվների պարամետրերը, ինչպիսիք են ատամների հարաբերակցությունը և լիսեռի անցքը:
3. Վերանորոգման մտադրություն.
Մասնավորապես՝ ուղիղ, թե կիսաուղղակի փոխանցման դեպքում, քանի որ շարժիչի արագությունը չափազանց ցածր է, անհրաժեշտ է իրականացնել փակ ցիկլի կառավարում, և որոշ ինվերտորներ չեն աջակցում փակ ցիկլի կառավարմանը։ Բացի այդ, շարժիչի արդյունավետությունն ավելի ցածր է, մինչդեռ շարժիչի արժեքը բարձր է, ծախսարդյունավետությունը բարձր չէ։ Բարելավման առավելությունը հուսալիության և սպասարկման կարիք չունենալն է։
Եթե ծախսը և ծախսարդյունավետությունը ավելի կարևոր են, կան որոշ պայմաններ, երբ կիսաուղղակի փոխանցման լուծումը կարող է նպատակահարմար լինել՝ միաժամանակ ապահովելով սպասարկման կրճատում։
4. Պահանջարկի վերահսկում.
Արդյո՞ք ինվերտորի ապրանքանիշը պարտադիր է, արդյոք փակ ցիկլը պարտադիր է, արդյոք շարժիչի և ինվերտորի միջև կապի հեռավորությունը պետք է հագեցած լինի էլեկտրոնային կառավարման պահարանով, ինչ գործառույթներ պետք է ունենա էլեկտրոնային կառավարման պահարանը, և ինչ կապի ազդանշաններ են պահանջվում հեռակառավարվող DCS-ի համար։
Ո՞րն է նույն չափի մշտական մագնիսով շարժիչների և ասինխրոն շարժիչների կորուստների միջև հիմնական տարբերությունը։
Ստատորի պղնձի ցածր սպառում, ռոտորի պղնձի ցածր սպառում և ռոտորի երկաթի ցածր սպառում։





