1970-ականներին հազվագյուտ հողային մշտական մագնիսներով նյութերի զարգացման հետ մեկտեղ ի հայտ եկան հազվագյուտ հողային մշտական մագնիսներով շարժիչները: Մշտական մագնիսներով շարժիչները օգտագործում են հազվագյուտ հողային մշտական մագնիսներ գրգռման համար, և մշտական մագնիսները կարող են ստեղծել մշտական մագնիսական դաշտեր մագնիսացումից հետո: Դրա գրգռման կատարողականությունը գերազանց է, և այն գերազանցում է էլեկտրական գրգռման շարժիչներին կայունության, որակի և կորուստների նվազեցման առումով, ինչը ցնցել է ավանդական շարժիչների շուկան:
Վերջին տարիներին, ժամանակակից գիտության և տեխնոլոգիայի արագ զարգացման հետ մեկտեղ, էլեկտրամագնիսական նյութերի, մասնավորապես՝ հազվագյուտ հողային էլեկտրամագնիսական նյութերի, աշխատանքը և տեխնոլոգիան աստիճանաբար բարելավվել են։ Հզոր էլեկտրոնիկայի, հզորության փոխանցման տեխնոլոգիայի և ավտոմատ կառավարման տեխնոլոգիայի արագ զարգացմանը զուգընթաց, մշտական մագնիսով սինխրոն շարժիչների աշխատանքը գնալով ավելի ու ավելի է բարելավվում։
Ավելին, մշտական մագնիսով սինխրոն շարժիչներն ունեն թեթև քաշի, պարզ կառուցվածքի, փոքր չափերի, լավ բնութագրերի և բարձր հզորության խտության առավելություններ: Շատ գիտահետազոտական հաստատություններ և ձեռնարկություններ ակտիվորեն իրականացնում են մշտական մագնիսով սինխրոն շարժիչների հետազոտություններ և մշակումներ, և դրանց կիրառման ոլորտները հետագայում կընդլայնվեն:
1. Մշտական մագնիսով սինխրոն շարժիչի մշակման հիմքը
ա. Բարձր արդյունավետությամբ հազվագյուտ հողային մշտական մագնիսական նյութերի կիրառումը
Հազվագյուտ հողային մշտական մագնիսական նյութերը անցել են երեք փուլով՝ SmCo5, Sm2Co17 և Nd2Fe14B: Ներկայումս NdFeB-ով ներկայացված մշտական մագնիսական նյութերը դարձել են հազվագյուտ հողային մշտական մագնիսական նյութերի ամենատարածված տեսակը՝ իրենց գերազանց մագնիսական հատկությունների շնորհիվ: Մշտական մագնիսական նյութերի զարգացումը խթանել է մշտական մագնիսական շարժիչների զարգացումը:
Համեմատած էլեկտրական գրգռմամբ ավանդական եռաֆազ ասինխրոն շարժիչի հետ, մշտական մագնիսը փոխարինում է էլեկտրական գրգռման բևեռը, պարզեցնում է կառուցվածքը, վերացնում է ռոտորի սահող օղակը և խոզանակը, ապահովում է անխոզանակ կառուցվածք և նվազեցնում է ռոտորի չափսը։ Սա բարելավում է շարժիչի հզորության խտությունը, պտտող մոմենտի խտությունը և աշխատանքային արդյունավետությունը, դարձնում շարժիչը ավելի փոքր և թեթև, ընդլայնելով դրա կիրառման ոլորտը և խթանելով էլեկտրական շարժիչների զարգացումը՝ ավելի բարձր հզորության ուղղությամբ։
բ. Նոր կառավարման տեսության կիրառումը
Վերջին տարիներին կառավարման ալգորիթմները արագ զարգացել են: Դրանց թվում են վեկտորային կառավարման ալգորիթմները, որոնք սկզբունքորեն լուծել են փոփոխական հոսանքի շարժիչների շարժիչի կառավարման ռազմավարության խնդիրը, ինչը փոփոխական հոսանքի շարժիչներին հնարավորություն է տվել ունենալ լավ կառավարման արդյունավետություն: Ուղղակի պտտող մոմենտի կառավարման ի հայտ գալը պարզեցնում է կառավարման կառուցվածքը և ունի պարամետրերի փոփոխությունների և պտտող մոմենտի դինամիկ արձագանքի արագության ուժեղ սխեմայի բնութագրեր: Անուղղակի պտտող մոմենտի կառավարման տեխնոլոգիան լուծում է ուղիղ պտտող մոմենտի մեծ պտտող մոմենտի պուլսացիայի խնդիրը ցածր արագության դեպքում և բարելավում է շարժիչի արագությունն ու կառավարման ճշգրտությունը:
գ. Բարձր արդյունավետությամբ էլեկտրական սարքերի և պրոցեսորների կիրառումը
Ժամանակակից ուժային էլեկտրոնիկայի տեխնոլոգիան կարևոր միջերես է տեղեկատվական արդյունաբերության և ավանդական արդյունաբերությունների միջև, ինչպես նաև կամուրջ՝ թույլ հոսանքի և կառավարվող ուժեղ հոսանքի միջև։ Ուժային էլեկտրոնիկայի տեխնոլոգիայի զարգացումը հնարավորություն է տալիս իրականացնել շարժիչի կառավարման ռազմավարություններ։
1970-ականներին ի հայտ եկան ընդհանուր նշանակության ինվերտորների շարք, որոնք կարող էին արդյունաբերական հաճախականության էներգիան փոխակերպել փոփոխական հաճախականության էներգիայի՝ անընդհատ կարգավորվող հաճախականությամբ, այդպիսով ստեղծելով պայմաններ փոփոխական հաճախականության արագության կարգավորման համար: Այս ինվերտորներն ունեն մեղմ մեկնարկի հնարավորություն հաճախականությունը սահմանելուց հետո, և հաճախականությունը կարող է զրոյից բարձրանալ մինչև սահմանված հաճախականությունը որոշակի արագությամբ, իսկ բարձրացման արագությունը կարող է անընդհատ կարգավորվել լայն միջակայքում՝ լուծելով սինխրոն շարժիչների մեկնարկի խնդիրը:
2. Մշտական մագնիսով սինխրոն շարժիչների զարգացման վիճակը երկրում և արտերկրում
Պատմության մեջ առաջին շարժիչը մշտական մագնիսով շարժիչ էր։ Այդ ժամանակ մշտական մագնիսով նյութերի աշխատանքը համեմատաբար վատ էր, իսկ մշտական մագնիսների հարկադրական ուժը և մնացորդային դիմադրությունը՝ չափազանց ցածր, ուստի դրանք շուտով փոխարինվեցին էլեկտրական գրգռիչ շարժիչներով։
1970-ականներին NdFeB-ով ներկայացված հազվագյուտ հողային մշտական մագնիսական նյութերը ունեին մեծ կոերսիֆիկացիոն ուժ, մնացորդային ուժ, ուժեղ ապամագնիսացման ունակություն և մեծ մագնիսական էներգիայի արտադրանք, ինչը պատմության մեջ դրեց բարձր հզորության մշտական մագնիսով սինխրոն շարժիչները: Այժմ մշտական մագնիսով սինխրոն շարժիչների հետազոտությունները դառնում են ավելի ու ավելի զարգացած և զարգանում են բարձր արագության, բարձր պտտող մոմենտի, բարձր հզորության և բարձր արդյունավետության ուղղությամբ:
Վերջին տարիներին, տեղական գիտնականների և կառավարության մեծ ներդրումների շնորհիվ, մշտական մագնիսով սինխրոն շարժիչները արագ զարգացել են: Միկրոհամակարգչային տեխնոլոգիայի և ավտոմատ կառավարման տեխնոլոգիայի զարգացման շնորհիվ մշտական մագնիսով սինխրոն շարժիչները լայնորեն կիրառվել են տարբեր ոլորտներում: Հասարակության առաջընթացի շնորհիվ մարդկանց պահանջները մշտական մագնիսով սինխրոն շարժիչների նկատմամբ դարձել են ավելի խիստ, ինչը մղել է մշտական մագնիսով շարժիչներին զարգանալ ավելի մեծ արագության կարգավորման միջակայքում և ավելի բարձր ճշգրտության կառավարման ուղղությամբ: Ներկայիս արտադրական գործընթացների կատարելագործման շնորհիվ, բարձր արդյունավետությամբ մշտական մագնիսով նյութերը հետագայում մշակվել են: Սա զգալիորեն նվազեցնում է դրանց արժեքը և աստիճանաբար կիրառում դրանք կյանքի տարբեր ոլորտներում:
3. Ներկայիս տեխնոլոգիաները
ա. Մշտական մագնիսով սինխրոն շարժիչի նախագծման տեխնոլոգիա
Սովորական էլեկտրական գրգռման շարժիչների համեմատ, մշտական մագնիսով սինխրոն շարժիչները չունեն էլեկտրական գրգռման փաթույթներ, կոլեկտորային օղակներ և գրգռման պահարաններ, ինչը զգալիորեն բարելավում է ոչ միայն կայունությունն ու հուսալիությունը, այլև արդյունավետությունը։
Դրանց թվում ներկառուցված մշտական մագնիսով շարժիչներն ունեն բարձր արդյունավետության, բարձր հզորության գործակցի, բարձր միավորի հզորության խտության, ուժեղ թույլ մագնիսական արագությամբ ընդարձակման ունակության և արագ դինամիկ արձագանքման արագության առավելություններ, ինչը դրանք դարձնում է շարժիչները վարելու համար իդեալական ընտրություն։
Մշտական մագնիսները ապահովում են մշտական մագնիսներով շարժիչների ամբողջ գրգռման մագնիսական դաշտը, իսկ ատամնավոր պտտող մոմենտը կմեծացնի շարժիչի տատանումն ու աղմուկը աշխատանքի ընթացքում: Ատամնավոր պտտող մոմենտի չափազանց մեծ ազդեցությունը կազդի շարժիչի արագության կառավարման համակարգի ցածր արագության աշխատանքի և դիրքի կառավարման համակարգի բարձր ճշգրտության դիրքավորման վրա: Հետևաբար, շարժիչը նախագծելիս ատամնավոր պտտող մոմենտը պետք է հնարավորինս նվազեցվի շարժիչի օպտիմալացման միջոցով:
Հետազոտությունների համաձայն, ատամնավոր պտտող մոմենտը նվազեցնելու ընդհանուր մեթոդներն են՝ բևեռի աղեղի գործակցի փոփոխությունը, ստատորի անցքի լայնության կրճատումը, թեք անցքի և բևեռի անցքի համապատասխանեցումը, մագնիսական բևեռի դիրքի, չափի և ձևի փոփոխությունը և այլն: Այնուամենայնիվ, պետք է նշել, որ ատամնավոր պտտող մոմենտը նվազեցնելիս դա կարող է ազդել շարժիչի այլ արտադրողականության վրա, օրինակ՝ էլեկտրամագնիսական պտտող մոմենտը կարող է համապատասխանաբար նվազել: Հետևաբար, նախագծելիս տարբեր գործոններ պետք է հնարավորինս հավասարակշռվեն՝ շարժիչի լավագույն արտադրողականությանը հասնելու համար:
բ. Մշտական մագնիսով սինխրոն շարժիչի մոդելավորման տեխնոլոգիա
Մշտական մագնիսների առկայությունը մշտական մագնիսների առկայությունը դժվարացնում է նախագծողների համար պարամետրերի հաշվարկը, ինչպիսիք են անբեռնվածության արտահոսքի հոսքի գործակիցը և բևեռային աղեղի գործակիցը: Ընդհանուր առմամբ, վերջավոր տարրերի վերլուծության ծրագիրը օգտագործվում է մշտական մագնիսով շարժիչների պարամետրերը հաշվարկելու և օպտիմալացնելու համար: Վերջավոր տարրերի վերլուծության ծրագիրը կարող է շատ ճշգրիտ հաշվարկել շարժիչի պարամետրերը, և այն շատ հուսալի է օգտագործել շարժիչի պարամետրերի ազդեցությունը աշխատանքի վրա վերլուծելու համար:
Վերջավոր տարրերի հաշվարկման մեթոդը մեզ համար ավելի հեշտ, արագ և ճշգրիտ է դարձնում շարժիչների էլեկտրամագնիսական դաշտի հաշվարկը և վերլուծությունը: Սա թվային մեթոդ է, որը մշակվել է տարբերությունների մեթոդի հիման վրա և լայնորեն կիրառվել է գիտության և ճարտարագիտության մեջ: Օգտագործեք մաթեմատիկական մեթոդներ՝ որոշ անընդհատ լուծումների տիրույթներ դիսկրետացնելու համար միավորների խմբերի, ապա ինտերպոլյացիայի ենթարկելու համար յուրաքանչյուր միավորում: Այս կերպ ձևավորվում է գծային ինտերպոլյացիայի ֆունկցիա, այսինքն՝ մոտավոր ֆունկցիան մոդելավորվում և վերլուծվում է վերջավոր տարրերի միջոցով, ինչը թույլ է տալիս մեզ ինտուիտիվորեն դիտարկել մագնիսական դաշտի գծերի ուղղությունը և մագնիսական հոսքի խտության բաշխումը շարժիչի ներսում:
գ. Մշտական մագնիսով սինխրոն շարժիչի կառավարման տեխնոլոգիա
Արդյունաբերական կառավարման ոլորտի զարգացման համար մեծ նշանակություն ունի նաև շարժիչային համակարգերի աշխատանքի բարելավումը։ Այն հնարավորություն է տալիս համակարգը շահագործել լավագույն աշխատանքով։ Դրա հիմնական բնութագրերը արտացոլվում են ցածր արագությամբ, հատկապես արագ մեկնարկի, ստատիկ արագացման և այլնի դեպքում, այն կարող է արտադրել մեծ պտտող մոմենտ, իսկ բարձր արագությամբ շահագործելիս այն կարող է հասնել արագության հաստատուն կարգավորման լայն տիրույթում։ Աղյուսակ 1-ում համեմատվում են մի քանի հիմնական շարժիչների աշխատանքը։
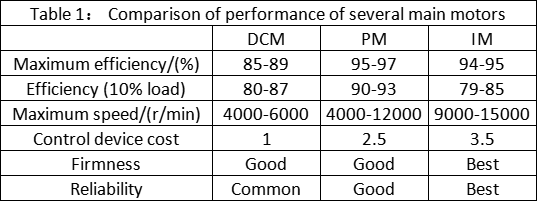
Ինչպես երևում է աղյուսակ 1-ից, մշտական մագնիսով շարժիչները ունեն լավ հուսալիություն, լայն արագության միջակայք և բարձր արդյունավետություն: Համապատասխան կառավարման մեթոդի հետ համատեղելու դեպքում ամբողջ շարժիչային համակարգը կարող է հասնել լավագույն աշխատանքին: Հետևաբար, անհրաժեշտ է ընտրել համապատասխան կառավարման ալգորիթմ՝ արագության արդյունավետ կարգավորմանը հասնելու համար, որպեսզի շարժիչի փոխանցման համակարգը կարողանա գործել համեմատաբար լայն արագության կարգավորման տարածքում և հաստատուն հզորության միջակայքում:
Վեկտորային կառավարման մեթոդը լայնորեն կիրառվում է մշտական մագնիսով շարժիչի արագության կառավարման ալգորիթմում։ Այն ունի արագության կարգավորման լայն տիրույթ, բարձր արդյունավետություն, բարձր հուսալիություն, լավ կայունություն և լավ տնտեսական օգուտներ։ Այն լայնորեն կիրառվում է շարժիչային փոխանցման, երկաթուղային տրանսպորտի և մեքենագործիքների սերվո շարժիչներում։ Տարբեր կիրառությունների պատճառով, ներկայիս վեկտորային կառավարման ռազմավարությունը նույնպես տարբեր է։
4. Մշտական մագնիսով սինխրոն շարժիչի բնութագրերը
Մշտական մագնիսով սինխրոն շարժիչն ունի պարզ կառուցվածք, ցածր կորուստներ և բարձր հզորության գործակից։ Էլեկտրական գրգռման շարժիչի համեմատ, քանի որ չկան խոզանակներ, կոմուտատորներ և այլ սարքեր, ռեակտիվ գրգռման հոսանք չի պահանջվում, ուստի ստատորի հոսանքի և դիմադրության կորուստները փոքր են, արդյունավետությունը՝ ավելի բարձր, գրգռման պտտող մոմենտը՝ ավելի մեծ, և կառավարման կատարողականությունն՝ ավելի լավ։ Այնուամենայնիվ, կան թերություններ, ինչպիսիք են բարձր արժեքը և մեկնարկի դժվարությունը։ Շարժիչներում կառավարման տեխնոլոգիաների կիրառման, մասնավորապես վեկտորային կառավարման համակարգերի կիրառման շնորհիվ, մշտական մագնիսով սինխրոն շարժիչները կարող են հասնել լայնածավալ արագության կարգավորման, արագ դինամիկ արձագանքի և բարձր ճշգրտության դիրքորոշման կառավարման, ուստի մշտական մագնիսով սինխրոն շարժիչները կգրավեն ավելի շատ մարդկանց՝ լայնածավալ հետազոտություններ անցկացնելու համար։
5. Anhui Mingteng մշտական մագնիսով սինխրոն շարժիչի տեխնիկական բնութագրերը
ա. Էլեկտրաշարժիչն ունի բարձր հզորության գործակից և էլեկտրական ցանցի բարձր որակի գործակից։ Հզորության գործակցի փոխհատուցիչ անհրաժեշտ չէ, և ենթակայանի սարքավորումների հզորությունը կարող է լիովին օգտագործվել։
բ. Մշտական մագնիսով շարժիչը գրգռվում է մշտական մագնիսներով և աշխատում է համաժամանակյա։ Արագության պուլսացիա չկա, և խողովակաշարի դիմադրությունը չի մեծանում օդափոխիչների և պոմպերի աշխատանքի ժամանակ։
գ. Մշտական մագնիսով շարժիչը կարող է նախագծվել բարձր մեկնարկային պտտող մոմենտով (ավելի քան 3 անգամ) և անհրաժեշտության դեպքում բարձր գերբեռնվածության հզորությամբ, այդպիսով լուծելով «մեծ ձին քաշում է փոքր սայլը» երևույթը։
դ. Սովորական ասինխրոն շարժիչի ռեակտիվ հոսանքը սովորաբար անվանական հոսանքի մոտ 0.5-0.7 անգամ մեծ է։ Mingteng մշտական մագնիսով սինխրոն շարժիչը գրգռման հոսանքի կարիք չունի։ Մշտական մագնիսով շարժիչի և ասինխրոն շարժիչի ռեակտիվ հոսանքը մոտ 50%-ով տարբերվում է, իսկ իրական աշխատանքային հոսանքը մոտ 15%-ով ցածր է ասինխրոն շարժիչի ռեակտիվ հոսանքից։
ե. Էլեկտրաշարժիչը կարող է նախագծվել անմիջապես մեկնարկելու համար, և արտաքին տեղադրման չափերը նույնն են, ինչ ներկայումս լայնորեն օգտագործվող ասինխրոն շարժիչներինը, որոնք կարող են լիովին փոխարինել ասինխրոն շարժիչներին։
զ. Դրայվերի ավելացումը կարող է ապահովել մեղմ մեկնարկ, մեղմ կանգառ և անඛවන් արագության կարգավորում՝ լավ դինամիկ արձագանքով և էներգախնայողության հետագա բարելավված ազդեցությամբ։
է. Էլեկտրաշարժիչն ունի բազմաթիվ տոպոլոգիական կառուցվածքներ, որոնք անմիջականորեն բավարարում են մեխանիկական սարքավորումների հիմնարար պահանջները լայն տիրույթում և ծայրահեղ պայմաններում։
ժ. Համակարգի արդյունավետությունը բարելավելու, փոխանցման շղթան կրճատելու և սպասարկման ծախսերը նվազեցնելու համար, բարձր և ցածր արագությամբ ուղիղ փոխանցմամբ մշտական մագնիսով սինխրոն շարժիչները կարող են նախագծվել և արտադրվել՝ օգտագործողների ավելի բարձր պահանջները բավարարելու համար:
«Անհուի Մինգտենգ» մշտական մագնիսական մեքենաների և էլեկտրական սարքավորումների ընկերություն, ՍՊԸ (https://www.mingtengmotor.com/) հիմնադրվել է 2007 թվականին։ Այն բարձր տեխնոլոգիական ձեռնարկություն է, որը մասնագիտանում է գերբարձր արդյունավետությամբ մշտական մագնիսով սինխրոն շարժիչների հետազոտման և մշակման, արտադրության և վաճառքի մեջ։ Ընկերությունն օգտագործում է ժամանակակից շարժիչի նախագծման տեսություն, մասնագիտական նախագծման ծրագրային ապահովում և ինքնուրույն մշակված մշտական մագնիսով շարժիչի նախագծման ծրագիր՝ մշտական մագնիսով շարժիչի էլեկտրամագնիսական դաշտը, հեղուկի դաշտը, ջերմաստիճանի դաշտը, լարվածության դաշտը և այլն մոդելավորելու, մագնիսական շղթայի կառուցվածքը օպտիմալացնելու, շարժիչի էներգաարդյունավետության մակարդակը բարելավելու և մշտական մագնիսով շարժիչի հուսալի օգտագործումը հիմնարար կերպով ապահովելու համար։
Հեղինակային իրավունք. Այս հոդվածը WeChat-ի «Motor Alliance» հանրային համարի վերատպությունն է, որը բնօրինակ հղումն է։https://mp.weixin.qq.com/s/tROOkT3pQwZtnHJT4Ji0Cg
Այս հոդվածը չի արտացոլում մեր ընկերության տեսակետները։ Եթե դուք ունեք տարբեր կարծիքներ կամ տեսակետներ, խնդրում ենք ուղղել մեզ։
Հրապարակման ժամանակը. Սեպտեմբերի 14-2024