Տարբեր տեսակի շարժիչների միջև եղած տարբերությունը
1. Մշտական և փոփոխական հոսանքի շարժիչների միջև եղած տարբերությունները
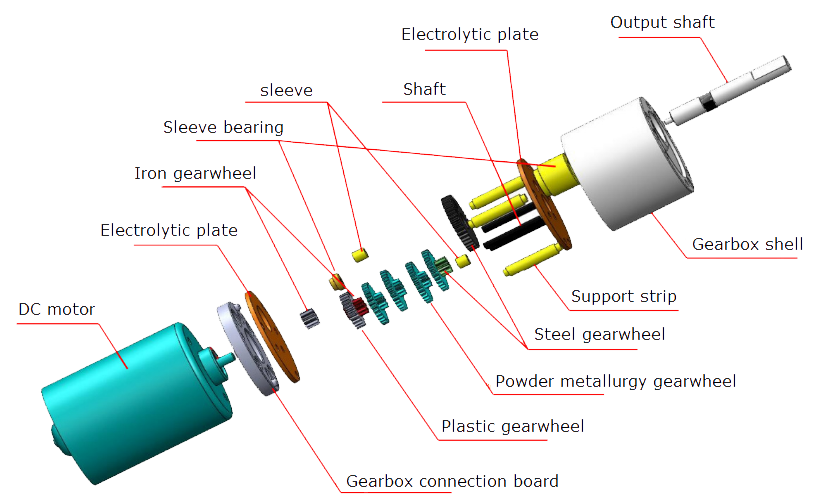
DC շարժիչի կառուցվածքի դիագրամ
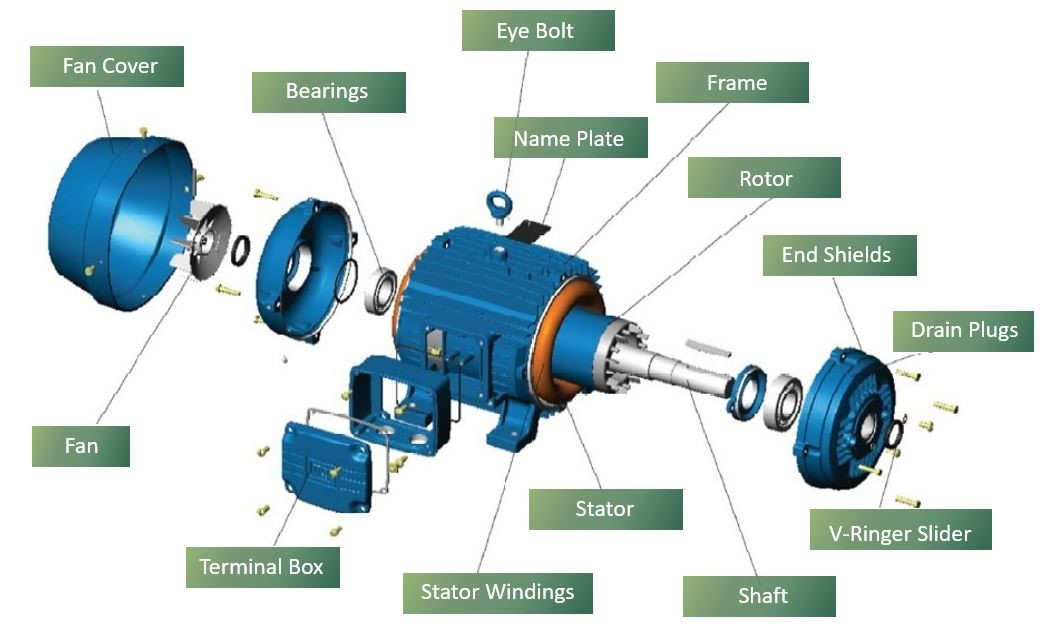
AC շարժիչի կառուցվածքի դիագրամ
Մշտական հոսանքի շարժիչները որպես էներգիայի աղբյուր օգտագործում են հաստատուն հոսանք, մինչդեռ փոփոխական հոսանքի շարժիչները որպես էներգիայի աղբյուր օգտագործում են փոփոխական հոսանք։
Կառուցվածքային առումով, հաստատուն հոսանքի շարժիչների սկզբունքը համեմատաբար պարզ է, բայց կառուցվածքը բարդ է և հեշտ չէ պահպանել: AC շարժիչների սկզբունքը բարդ է, բայց կառուցվածքը համեմատաբար պարզ է, և դրանք ավելի հեշտ են պահպանել, քան հաստատուն հոսանքի շարժիչները:
Գնի առումով, նույն հզորությամբ հաստատուն հոսանքի շարժիչները ավելի թանկ են, քան փոփոխական հոսանքի շարժիչները: Արագության կարգավորիչ սարքի հետ մեկտեղ, հաստատուն հոսանքի գինը ավելի բարձր է, քան փոփոխական հոսանքի գինը: Իհարկե, կան նաև մեծ տարբերություններ կառուցվածքի և սպասարկման մեջ:
Արդյունավետության առումով, քանի որ հաստատուն հոսանքի շարժիչների արագությունը կայուն է, իսկ արագության կառավարումը՝ ճշգրիտ, ինչը հնարավոր չէ իրականացնել փոփոխական հոսանքի շարժիչներով, խիստ արագության պահանջների դեպքում փոփոխական հոսանքի շարժիչների փոխարեն պետք է օգտագործվեն հաստատուն հոսանքի շարժիչներ։
AC շարժիչների արագության կարգավորումը համեմատաբար բարդ է, բայց այն լայնորեն կիրառվում է, քանի որ քիմիական գործարաններն օգտագործում են AC հոսանք։
2. Սինխրոն և ասինխրոն շարժիչների միջև եղած տարբերությունները
Եթե ռոտորը պտտվում է ստատորի հետ նույն արագությամբ, այն կոչվում է սինխրոն շարժիչ։ Եթե դրանք նույնը չեն, ապա այն կոչվում է ասինխրոն շարժիչ։
3. Սովորական և փոփոխական հաճախականության շարժիչների միջև տարբերությունը
Նախևառաջ, սովորական շարժիչները չեն կարող օգտագործվել որպես փոփոխական հաճախականության շարժիչներ: Սովորական շարժիչները նախագծված են հաստատուն հաճախականության և հաստատուն լարման համաձայն, և անհնար է լիովին հարմարվել հաճախականության փոխարկիչի արագության կարգավորման պահանջներին, ուստի դրանք չեն կարող օգտագործվել որպես փոփոխական հաճախականության շարժիչներ:
Հաճախականության փոխարկիչների ազդեցությունը շարժիչների վրա հիմնականում շարժիչների արդյունավետության և ջերմաստիճանի բարձրացման վրա է։
Հաճախականության փոխարկիչը կարող է աշխատանքի ընթացքում առաջացնել տարբեր աստիճանի հարմոնիկ լարման և հոսանքի, այնպես որ շարժիչը աշխատում է ոչ սինուսոիդալ լարման և հոսանքի տակ: Դրա մեջ բարձր կարգի հարմոնիկները կհանգեցնեն շարժիչի ստատորի պղնձի կորստի, ռոտորի պղնձի կորստի, երկաթի կորստի և լրացուցիչ կորստի աճի:
Դրանցից ամենակարևորը ռոտորում պղնձի կորուստն է։ Այս կորուստները կհանգեցնեն շարժիչի կողմից լրացուցիչ ջերմության առաջացմանը, կնվազեցնեն արդյունավետությունը, կկրճատեն ելքային հզորությունը, իսկ սովորական շարժիչների ջերմաստիճանի բարձրացումը, որպես կանոն, կաճի 10%-20%-ով։
Հաճախականության փոխարկիչի կրող հաճախականությունը տատանվում է մի քանի կիլոհերցից մինչև տասը կիլոհերցից ավելի, ինչը թույլ է տալիս շարժիչի ստատորի փաթույթին դիմակայել շատ բարձր լարման բարձրացման արագությանը, ինչը համարժեք է շարժիչին շատ կտրուկ իմպուլսային լարման կիրառմանը, ինչը շարժիչի միջպտույտային մեկուսացումը դարձնում է ավելի խիստ փորձության դիմակայող։
Երբ սովորական շարժիչները սնուցվում են հաճախականության փոխարկիչներով, էլեկտրամագնիսական, մեխանիկական, օդափոխության և այլ գործոններից առաջացած թրթռումն ու աղմուկը կդառնան ավելի բարդ։
Փոփոխական հաճախականության էլեկտրամատակարարման մեջ պարունակվող հարմոնիկները խանգարում են շարժիչի էլեկտրամագնիսական մասի բնորոշ տարածական հարմոնիկներին՝ ձևավորելով տարբեր էլեկտրամագնիսական գրգռման ուժեր, դրանով իսկ մեծացնելով աղմուկը։
Շարժիչի լայն աշխատանքային հաճախականության տիրույթի և արագության մեծ տատանման տիրույթի պատճառով, տարբեր էլեկտրամագնիսական ուժային ալիքների հաճախականություններից դժվար է խուսափել շարժիչի տարբեր կառուցվածքային մասերի բնորոշ տատանումների հաճախականություններից։
Երբ էլեկտրամատակարարման հաճախականությունը ցածր է, էլեկտրամատակարարման բարձր կարգի հարմոնիկաների պատճառով կորուստը մեծ է։ Երկրորդ, երբ փոփոխական շարժիչի արագությունը նվազում է, սառեցնող օդի ծավալը նվազում է արագության խորանարդին ուղիղ համեմատականորեն, ինչի արդյունքում շարժիչի ջերմությունը չի ցրվում, ջերմաստիճանի բարձրացումը կտրուկ աճում է, և դժվար է հասնել հաստատուն պտտող մոմենտի։
4. Սովորական շարժիչների և փոփոխական հաճախականության շարժիչների միջև կառուցվածքային տարբերությունը
01. Բարձր ջերմամեկուսացման մակարդակի պահանջներ
Սովորաբար, փոփոխական հաճախականության շարժիչների մեկուսացման մակարդակը F կամ ավելի բարձր է: Պետք է ուժեղացվի գետնից մեկուսացումը և լարերի պտույտների մեկուսացման ամրությունը, և հատկապես պետք է հաշվի առնվի մեկուսացման իմպուլսային լարմանը դիմակայելու ունակությունը:
02. Փոփոխական հաճախականության շարժիչների համար ավելի բարձր թրթռման և աղմուկի պահանջներ
Փոփոխական հաճախականության շարժիչները պետք է լիովին հաշվի առնեն շարժիչի բաղադրիչների և ամբողջության կոշտությունը և փորձեն մեծացնել դրանց բնական հաճախականությունը՝ յուրաքանչյուր ուժային ալիքի հետ ռեզոնանսից խուսափելու համար։
03. Փոփոխական հաճախականության շարժիչների սառեցման տարբեր մեթոդներ
Փոփոխական հաճախականության շարժիչները սովորաբար օգտագործում են հարկադիր օդափոխման սառեցում, այսինքն՝ հիմնական շարժիչի սառեցման օդափոխիչը շարժվում է անկախ շարժիչով։
04. Պահանջվում են տարբեր պաշտպանիչ միջոցներ
160 կՎտ-ից ավելի հզորությամբ փոփոխական հաճախականության շարժիչների համար պետք է ձեռնարկվեն կրողների մեկուսացման միջոցառումներ: Հիմնականում հեշտ է առաջացնել մագնիսական շղթայի ասիմետրիա և լիսեռի հոսանք: Երբ այլ բարձր հաճախականության բաղադրիչներից առաջացող հոսանքը միացվում է, լիսեռի հոսանքը զգալիորեն աճում է, ինչը հանգեցնում է կրողների վնասմանը, ուստի սովորաբար ձեռնարկվում են մեկուսացման միջոցառումներ: Հաստատուն հզորության փոփոխական հաճախականության շարժիչների համար, երբ արագությունը գերազանցում է 3000/րոպե, պետք է օգտագործվի հատուկ բարձր ջերմաստիճանին դիմացկուն քսուք՝ կրողների ջերմաստիճանի բարձրացումը փոխհատուցելու համար:
05. Տարբեր սառեցման համակարգ
Փոփոխական հաճախականության շարժիչի սառեցման օդափոխիչը օգտագործում է անկախ սնուցման աղբյուր՝ անընդհատ սառեցման հզորությունն ապահովելու համար։
2. Շարժիչների մասին հիմնական գիտելիքներ
Շարժիչի ընտրություն
Շարժիչի ընտրության համար անհրաժեշտ հիմնական բաղադրիչներն են՝
Բեռի տեսակը, գնահատված հզորությունը, գնահատված լարումը, գնահատված արագությունը և այլ պայմաններ։
Բեռնման տեսակ՝ · DC շարժիչ · Ասինխրոն շարժիչ · Սինխրոն շարժիչ
Կայուն բեռով և գործարկման ու արգելակման հատուկ պահանջներ չունեցող անընդհատ արտադրության մեքենաների համար պետք է նախապատվությունը տալ մշտական մագնիսով սինխրոն շարժիչներին կամ սովորական սկյուռային վանդակավոր ասինխրոն շարժիչներին, որոնք լայնորեն կիրառվում են մեքենաներում, ջրային պոմպերում, օդափոխիչներում և այլն:
Հաճախակի մեկնարկման և արգելակման կարիք ունեցող և մեծ մեկնարկման ու արգելակման մոմենտ պահանջող արտադրական մեքենաների համար, ինչպիսիք են կամրջային կռունկները, հանքային ամբարձիչները, օդային կոմպրեսորները, անդարձելի գլանման գործարանները և այլն, պետք է օգտագործվեն մշտական մագնիսով սինխրոն շարժիչներ կամ փաթաթված ասինխրոն շարժիչներ։
Արագության կարգավորման պահանջներ չունեցող դեպքերի համար, երբ պահանջվում է հաստատուն արագություն կամ հզորության գործակիցը պետք է բարելավվի, պետք է օգտագործվեն մշտական մագնիսով սինխրոն շարժիչներ, ինչպիսիք են միջին և մեծ հզորության ջրային պոմպերը, օդային կոմպրեսորները, ամբարձիչները, աղացները և այլն։
Արտադրական մեքենաների համար, որոնք պահանջում են 1:3-ից ավելի արագության կարգավորման միջակայք և պահանջում են անընդհատ, կայուն և սահուն արագության կարգավորում, խորհուրդ է տրվում օգտագործել մշտական մագնիսով սինխրոն շարժիչներ կամ առանձին գրգռված հաստատուն հոսանքի շարժիչներ կամ սկյուռային վանդակավոր ասինխրոն շարժիչներ՝ փոփոխական հաճախականության արագության կարգավորմամբ, ինչպիսիք են խոշոր ճշգրիտ հաստոցները, էստակադային պլաներները, գլանման գործարանները, ամբարձիչները և այլն:
Ընդհանուր առմամբ, շարժիչը կարելի է մոտավորապես որոշել՝ տրամադրելով շարժիչի շարժվող բեռի տեսակը, անվանական հզորությունը, անվանական լարումը և անվանական արագությունը։
Սակայն, եթե բեռի պահանջները պետք է օպտիմալ կերպով բավարարվեն, այս հիմնական պարամետրերը հեռու են բավարար լինելուց։
Այլ պարամետրեր, որոնք պետք է տրամադրվեն, ներառում են՝ հաճախականությունը, աշխատանքային համակարգը, գերծանրաբեռնվածության պահանջները, մեկուսացման մակարդակը, պաշտպանության մակարդակը, իներցիայի մոմենտը, բեռի դիմադրության մոմենտի կորը, տեղադրման եղանակը, շրջակա միջավայրի ջերմաստիճանը, բարձրությունը, արտաքին պահանջները և այլն (տրամադրվում են կոնկրետ հանգամանքներին համապատասխան):
3. Շարժիչների մասին հիմնական գիտելիքներ
Շարժիչի ընտրության քայլեր
Երբ շարժիչը աշխատում է կամ խափանվում է, չորս մեթոդները՝ նայելը, լսելը, հոտոտելը և դիպչելը, կարող են օգտագործվել անսարքությունը ժամանակին կանխելու և վերացնելու համար՝ շարժիչի անվտանգ աշխատանքն ապահովելու համար։
1. Նայեք
Դիտարկեք, թե արդյոք շարժիչի աշխատանքի ընթացքում կան որևէ անոմալիաներ, որոնք հիմնականում դրսևորվում են հետևյալ իրավիճակներում:
1. Երբ ստատորի փաթույթը կարճ միացված է, կարող եք տեսնել շարժիչից դուրս եկող ծուխ։
2. Երբ շարժիչը լրջորեն գերբեռնված է կամ աշխատում է փուլային կորստով, արագությունը կնվազի, և կլինի ավելի ուժեղ «բզզոցի» ձայն։
3. Երբ շարժիչը նորմալ աշխատում է, բայց հանկարծակի կանգ է առնում, դուք կտեսնեք կայծեր, որոնք դուրս են գալիս թույլ միացումից. ապահովիչը այրվել է կամ որևէ մաս խրված է։
4. Եթե շարժիչը ուժեղ թրթռում է, հնարավոր է, որ փոխանցման սարքը խրված է կամ շարժիչը լավ չի ամրացված, ոտքի պտուտակները թուլացած են և այլն:
5. Եթե շարժիչի ներսում գտնվող շփման կետերի և միացումների վրա կան գունաթափման, այրվածքի և ծխի հետքեր, դա նշանակում է, որ կարող է լինել տեղային գերտաքացում, հաղորդչի միացման հատվածում վատ շփում կամ փաթույթի այրվածք և այլն:
2. Լսեք
Երբ շարժիչը նորմալ է աշխատում, այն պետք է արձակի միատարր և թեթև «բզզոց» ձայն՝ առանց աղմուկի և հատուկ հնչյունների։
Եթե աղմուկը չափազանց բարձր է, ներառյալ էլեկտրամագնիսական աղմուկը, կրողներից առաջացող աղմուկը, օդափոխության աղմուկը, մեխանիկական շփման աղմուկը և այլն, դա կարող է նախորդող կամ խափանման երևույթ լինել։
1. Էլեկտրամագնիսական աղմուկի դեպքում, եթե շարժիչը բարձր, ցածր և ծանր ձայն է արձակում, պատճառները կարող են լինել հետևյալը.
(1) Ստատորի և ռոտորի միջև օդային բացը անհավասար է։ Այս պահին ձայնը բարձր և ցածր է, իսկ բարձր և ցածր ձայների միջև ընկած ժամանակահատվածը մնում է անփոփոխ։ Սա պայմանավորված է կրողների մաշվածությամբ, ինչը ստատորն ու ռոտորը դարձնում է ոչ համակենտրոն։
(2) Եռաֆազ հոսանքը անհավասարակշռված է։ Սա պայմանավորված է եռաֆազ փաթույթի սխալ հողանցմամբ, կարճ միացմամբ կամ վատ կոնտակտով։ Եթե ձայնը շատ թույլ է, դա նշանակում է, որ շարժիչը լուրջ գերբեռնված է կամ աշխատում է փուլային անհամապատասխանությամբ։
(3) Երկաթե միջուկը թուլացած է։ Շարժիչի աշխատանքի ընթացքում թրթռումը թուլացնում է երկաթե միջուկի ամրացնող պտուտակները, ինչի հետևանքով երկաթե միջուկի սիլիցիումային պողպատե թերթը թուլանում է և աղմուկ է առաջացնում։
2. Կրողանի աղմուկի դեպքում դուք պետք է հաճախակի վերահսկեք այն շարժիչի աշխատանքի ընթացքում: Մոնիտորինգի մեթոդը հետևյալն է. պտուտակահանի մի ծայրը դրեք կրողանի տեղադրման մասին, իսկ մյուս ծայրը՝ ականջին մոտ, և դուք կարող եք լսել կրողանի շարժման ձայնը: Եթե կրողն աշխատում է նորմալ, ձայնը անընդհատ և նուրբ «շրշյուն» է՝ առանց որևէ տատանման կամ մետաղի շփման ձայների:
Եթե լսվում են հետևյալ ձայները, դա աննորմալ երևույթ է.
(1) Երբ կրողը աշխատում է, լսվում է «ճռռոցի» ձայն։ Սա մետաղի շփման ձայն է, որը սովորաբար առաջանում է կրողում յուղի պակասից։ Կրողը պետք է ապամոնտաժվի և ավելացվի համապատասխան քանակությամբ յուղ։
(2) Եթե լսվում է «ճռռոցի» ձայն, դա այն ձայնն է, որը լսվում է գնդիկի պտտման ժամանակ։ Այն սովորաբար առաջանում է ճարպի չորանալուց կամ յուղի պակասից։ Կարելի է ավելացնել համապատասխան քանակությամբ ճարպ։
(3) Եթե լսվում է «կտտոցի» կամ «ճռռոցի» ձայն, դա այն ձայնն է, որն առաջանում է առանցքակալում գնդիկի անկանոն շարժման հետևանքով։ Սա առաջանում է առանցքակալում գնդիկի վնասվածքի կամ շարժիչի երկարատև չօգտագործման հետևանքով, որի արդյունքում ճարպը չորանում է։
3. Եթե փոխանցման մեխանիզմը և շարժիչ մեխանիզմը անընդհատ ձայն են արձակում տատանվող ձայնի փոխարեն, դա կարելի է կարգավորել հետևյալ իրավիճակներում։
(1) Անհավասար գոտու միացման պատճառով պարբերաբար «պայթյուն» է առաջանում։
(2) Պարբերական «դոնգ-դոնգ» ձայնը առաջանում է միացման կամ ճախարակի և լիսեռի միջև եղած թուլացումից, ինչպես նաև բանալու կամ բանալու անցքի մաշվածությունից։
(3) Անհավասար բախման ձայնը առաջանում է օդափոխիչի կափարիչի հետ շեղբերի բախումից։
3. Հոտ
Խափանումները կարելի է նաև գնահատել և կանխել՝ շարժիչը հոտոտելով։
Բացեք միացման տուփը և հոտոտեք այն՝ տեսնելու համար, թե արդյոք այրված հոտ կա։ Եթե հայտնաբերվում է ներկի հատուկ հոտ, դա նշանակում է, որ շարժիչի ներքին ջերմաստիճանը չափազանց բարձր է. եթե հայտնաբերվում է ուժեղ այրված հոտ կամ այրված հոտ, հնարավոր է, որ մեկուսացման շերտի սպասարկման ցանցը կոտրված է կամ փաթույթը այրվել է։
Եթե հոտ չկա, անհրաժեշտ է օգտագործել մեգոհմմետր՝ փաթույթի և պատյանի միջև մեկուսացման դիմադրությունը չափելու համար։ Եթե այն 0.5 մեգոհմից պակաս է, այն պետք է չորացնել։ Եթե դիմադրությունը զրո է, նշանակում է, որ այն վնասված է։
4. Հպեք
Շարժիչի որոշ մասերի ջերմաստիճանին դիպչելը նույնպես կարող է որոշել անսարքության պատճառը։
Անվտանգությունն ապահովելու համար ձեռքի հետևի մասով դիպչեք շարժիչի պատյանին և կրողակի շրջակա մասերին։
Եթե ջերմաստիճանը աննորմալ է, պատճառները կարող են լինել հետևյալը.
1. Վատ օդափոխություն։ Օրինակ՝ օդափոխիչի ընկնելը, օդափոխման խողովակի խցանումը և այլն։
2. Ծանրաբեռնվածություն։ Հոսանքը չափազանց մեծ է, և ստատորի փաթույթը գերտաքացած է։
3. Ստատորի փաթույթի պտույտները կարճ միացված են կամ եռաֆազ հոսանքը անհավասարակշռված է:
4. Հաճախակի մեկնարկ կամ արգելակում։
5. Եթե կրողի շուրջ ջերմաստիճանը չափազանց բարձր է, դա կարող է պայմանավորված լինել կրողի վնասմամբ կամ յուղի պակասով։
Շարժիչի կրող կրողների ջերմաստիճանի կարգավորումները, դրանց պատճառները և բուժումը
Կանոնակարգերը սահմանում են, որ գլանվող կրողների առավելագույն ջերմաստիճանը չպետք է գերազանցի 95℃-ը, իսկ սահող կրողների առավելագույն ջերմաստիճանը՝ 80℃-ը։ Ջերմաստիճանի բարձրացումը չպետք է գերազանցի 55℃-ը (ջերմաստիճանի բարձրացումը փորձարկման ընթացքում կրողի ջերմաստիճանից հանած շրջակա միջավայրի ջերմաստիճանը է)։
Առանցքակալների ջերմաստիճանի չափազանց բարձրացման պատճառները և բուժումը.
(1) Պատճառ՝ լիսեռը ծռված է, և կենտրոնական գիծը ճշգրիտ չէ։ Բուժում՝ Կրկին գտեք կենտրոնը։
(2) Պատճառ՝ Հիմքի պտուտակները թուլացած են։ Բուժում՝ Ամրացրեք հիմքի պտուտակները։
(3) Պատճառ՝ Քսուքը մաքուր չէ։ Բուժում՝ Փոխարինեք քսուքը։
(4) Պատճառ՝ Քսուքը չափազանց երկար է օգտագործվել և չի փոխարինվել։ Բուժում՝ Մաքրել կրողներն ու փոխարինել քսուքը։
(5) Պատճառ՝ վնասված է առանցքակալի գնդիկը կամ գլանը։ Բուժում՝ փոխարինել առանցքակալը նորով։
«Անհուի Մինգտենգ» մշտական-մագնիսական մեքենաների և էլեկտրական սարքավորումների ընկերություն, ՍՊԸ(https://www.mingtengmotor.com/) 17 տարվա արագ զարգացման փորձ ունի։ Ընկերությունը մշակել և արտադրել է ավելի քան 2000 մշտական մագնիսով շարժիչներ՝ ավանդական, փոփոխական հաճախականության, պայթյունակայուն, փոփոխական հաճախականության պայթյունակայուն, ուղիղ փոխանցմամբ և պայթյունակայուն ուղիղ փոխանցմամբ շարքերով։ Շարժիչները հաջողությամբ շահագործվել են օդափոխիչների, ջրային պոմպերի, ժապավենային փոխակրիչների, գնդիկավոր ջրաղացների, խառնիչների, ջարդիչների, քերիչների, յուղի պոմպերի, մանող մեքենաների և այլ բեռների վրա՝ տարբեր ոլորտներում, ինչպիսիք են հանքարդյունաբերությունը, պողպատաձուլությունը և էլեկտրաէներգիան, հասնելով էներգախնայողության լավ արդյունքների և արժանանալով լայն ճանաչման։
Հեղինակային իրավունք. Այս հոդվածը բնօրինակ հղման վերատպությունն է.
https://mp.weixin.qq.com/s/hLDTgGlnZDcGe2Jm1oX0Hg
Այս հոդվածը չի արտացոլում մեր ընկերության տեսակետները։ Եթե դուք ունեք տարբեր կարծիքներ կամ տեսակետներ, խնդրում ենք ուղղել մեզ։
Հրապարակման ժամանակը. Նոյեմբեր-01-2024