Մշտական մագնիսով սինխրոն շարժիչի հետադարձ էլեկտրամագնիսական դաշտ
1. Ինչպե՞ս է առաջանում հակադարձ էլեկտրամագնիսական դաշտը։
Հակադարձ էլեկտրաշարժիչ ուժի առաջացումը հեշտ է հասկանալ։ Սկզբունքն այն է, որ հաղորդիչը կտրում է մագնիսական ուժի գծերը։ Քանի դեռ երկուսի միջև կա հարաբերական շարժում, մագնիսական դաշտը կարող է լինել անշարժ, և հաղորդիչը կտրում է այն, կամ հաղորդիչը կարող է լինել անշարժ, և մագնիսական դաշտը շարժվում է։
Մշտական մագնիսով սինխրոն շարժիչների համար դրանց կծիկները ամրացված են ստատորի (հաղորդչի) վրա, իսկ մշտական մագնիսները՝ ռոտորի (մագնիսական դաշտի) վրա։ Երբ ռոտորը պտտվում է, ռոտորի վրա մշտական մագնիսների կողմից առաջացած մագնիսական դաշտը կպտտվի և կկտրվի ստատորի կծիկներից՝ կծիկներում առաջացնելով հետադարձ էլեկտրաշարժիչ ուժ։ Ինչո՞ւ է այն կոչվում հետադարձ էլեկտրաշարժիչ ուժ։ Ինչպես անունն է հուշում, հետադարձ էլեկտրաշարժիչ ուժի E ուղղությունը հակառակ է ծայրային լարման U ուղղությանը (ինչպես ցույց է տրված նկար 1-ում)։
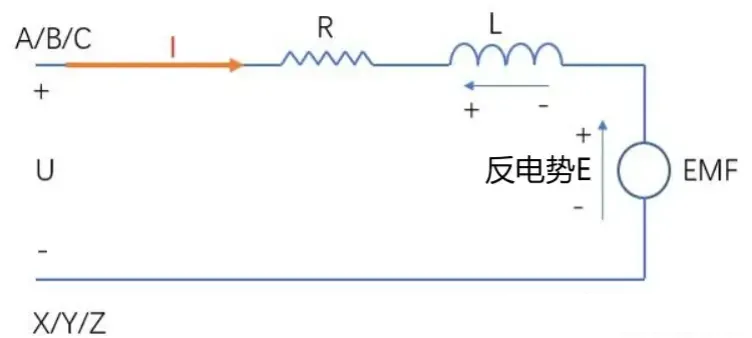
Նկար 1
2. Ի՞նչ կապ կա հակադարձ էլեկտրամագնիսական դաշտի և ծայրային լարման միջև։
Նկար 1-ից երևում է, որ հետադարձ էլեկտրաշարժիչ ուժի և բեռի տակ գտնվող ծայրային լարման միջև կապը հետևյալն է.
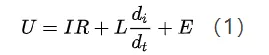
Հակադարձ էլեկտրաշարժիչ ուժի փորձարկումը սովորաբար իրականացվում է առանց բեռի, առանց հոսանքի և 1000 պտույտ/րոպե արագությամբ: Ընդհանուր առմամբ, 1000 պտույտ/րոպե արժեքը սահմանվում է որպես հետադարձ էլեկտրամագնիսական ուժի գործակից = հետադարձ էլեկտրամագնիսական ուժի միջին արժեք/արագություն: Հակադարձ էլեկտրամագնիսական ուժի գործակիցը շարժիչի կարևոր պարամետր է: Այստեղ պետք է նշել, որ բեռի տակ հետադարձ էլեկտրամագնիսական ուժը անընդհատ փոխվում է, նախքան արագությունը կայունանա: (1) բանաձևից կարող ենք իմանալ, որ բեռի տակ հետադարձ էլեկտրամագնիսական ուժը փոքր է ծայրային լարումից: Եթե հետադարձ էլեկտրամագնիսական ուժը մեծ է ծայրային լարումից, այն դառնում է գեներատոր և լարում է արտածում դեպի դուրս: Քանի որ իրական աշխատանքում դիմադրությունը և հոսանքը փոքր են, հետադարձ էլեկտրամագնիսական ուժի արժեքը մոտավորապես հավասար է ծայրային լարմանը և սահմանափակվում է ծայրային լարման անվանական արժեքով:
3. Հակադարձ էլեկտրաշարժիչ ուժի ֆիզիկական իմաստը
Պատկերացրեք, թե ինչ կլիներ, եթե հետադարձ էլեկտրամագնիսական դաշտը գոյություն չունենար։ Հավասարումից (1) մենք կարող ենք տեսնել, որ առանց հետադարձ էլեկտրամագնիսական դաշտի, ամբողջ շարժիչը համարժեք է մաքուր դիմադրության, դառնալով մի սարք, որը մեծ քանակությամբ ջերմություն է առաջացնում, ինչը հակասում է շարժիչի կողմից էլեկտրական էներգիան մեխանիկական էներգիայի փոխակերպմանը։ Էլեկտրական էներգիայի փոխակերպման հավասարման մեջ UIt-ը մուտքային էլեկտրական էներգիան է, օրինակ՝ մարտկոցի, շարժիչի կամ տրանսֆորմատորի մուտքային էլեկտրական էներգիան։ I2Rt-ը յուրաքանչյուր շղթայում ջերմային կորստի էներգիան է, որը ջերմային կորստի էներգիայի տեսակ է, որքան փոքր, այնքան լավ։ Մուտքային էլեկտրական էներգիայի և ջերմային կորստի էլեկտրական էներգիայի միջև եղած տարբերությունը։ Այն օգտակար էներգիա է, որը համապատասխանում է հակադարձ էլեկտրաշարժիչ ուժին։
UIt-ը մուտքային էլեկտրական էներգիան է, օրինակ՝ մարտկոցի, շարժիչի կամ տրանսֆորմատորի մուտքային էլեկտրական էներգիան։ I2Rt-ը յուրաքանչյուր շղթայում ջերմային կորստի էներգիան է, որը ջերմային կորստի էներգիայի տեսակ է, որքան փոքր, այնքան լավ։ Մուտքային էլեկտրական էներգիայի և ջերմային կորստի էլեկտրական էներգիայի միջև եղած տարբերությունը։ Այն օգտակար էներգիա է, որը համապատասխանում է հակադարձ էլեկտրաշարժիչ ուժին։ Այլ կերպ ասած, հետադարձ էլեկտրամագնիսական դաշտը (ԷՄԴ) օգտագործվում է օգտակար էներգիա ստեղծելու համար և հակադարձ համեմատական է ջերմության կորստին։ Որքան մեծ է ջերմության կորստի էներգիան, այնքան փոքր է հասանելի օգտակար էներգիան։ Օբյեկտիվորեն ասած, հետադարձ էլեկտրաշարժիչ ուժը սպառում է էլեկտրական էներգիա շղթայում, բայց դա «կորուստ» չէ։ Հակադարձ էլեկտրաշարժիչ ուժին համապատասխանող էլեկտրական էներգիայի մասը կվերածվի էլեկտրական սարքավորումների համար օգտակար էներգիայի, ինչպիսիք են շարժիչների մեխանիկական էներգիան, մարտկոցների քիմիական էներգիան և այլն։
Այլ կերպ ասած, հետադարձ էլեկտրամագնիսական դաշտը (ԷՄԴ) օգտագործվում է օգտակար էներգիա ստեղծելու համար և հակադարձ համեմատական է ջերմության կորստին։ Որքան մեծ է ջերմության կորստի էներգիան, այնքան փոքր է հասանելի օգտակար էներգիան։ Օբյեկտիվորեն ասած, հետադարձ էլեկտրաշարժիչ ուժը սպառում է էլեկտրական էներգիա շղթայում, բայց դա «կորուստ» չէ։ Հակադարձ էլեկտրաշարժիչ ուժին համապատասխանող էլեկտրական էներգիայի մասը կվերածվի էլեկտրական սարքավորումների համար օգտակար էներգիայի, ինչպիսիք են շարժիչների մեխանիկական էներգիան, մարտկոցների քիմիական էներգիան և այլն։
Դրանից կարելի է տեսնել, որ հետադարձ էլեկտրաշարժիչ ուժի մեծությունը նշանակում է էլեկտրական սարքավորումների ընդհանուր մուտքային էներգիան օգտակար էներգիայի վերածելու ունակությունը, ինչը արտացոլում է էլեկտրական սարքավորումների փոխակերպման ունակության մակարդակը։
4. Ինչի՞ց է կախված հետադարձ էլեկտրաշարժիչ ուժի մեծությունը։
Հակադարձ էլեկտրաշարժիչ ուժի հաշվարկման բանաձևը հետևյալն է.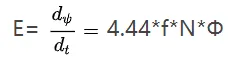
E-ն կծիկի էլեկտրաշարժիչ ուժն է, ψ-ն՝ մագնիսական հոսքը, f-ն՝ հաճախականությունը, N-ը՝ պտույտների քանակը, իսկ Φ-ն՝ մագնիսական հոսքը։
Վերոնշյալ բանաձևի հիման վրա, կարծում եմ՝ բոլորը կարող են մի քանի գործոններ նշել, որոնք ազդում են հետադարձ էլեկտրաշարժիչ ուժի մեծության վրա։ Ահա մի հոդված՝ ամփոփելու համար.
(1) Հակադարձ էլեկտրամագնիսական դաշտը հավասար է մագնիսական հոսքի փոփոխության արագությանը։ Որքան բարձր է արագությունը, այնքան մեծ է փոփոխության արագությունը և այնքան մեծ է հակադարձ էլեկտրամագնիսական դաշտը։
(2) Մագնիսական հոսքն ինքնին հավասար է պտույտների քանակի և մեկ պտույտով մագնիսական հոսքի բազմապատկմանը։ Հետևաբար, որքան մեծ է պտույտների քանակը, այնքան մեծ է մագնիսական հոսքը և այնքան մեծ է հետադարձ էլեկտրամագնիսական դաշտը։
(3) Պտույտների քանակը կապված է փաթույթների սխեմայի հետ, ինչպիսիք են աստղ-եռանկյուն միացումը, մեկ անցքի պտույտների քանակը, փուլերի քանակը, ատամների քանակը, զուգահեռ ճյուղերի քանակը և լրիվ կամ կարճ քայլի սխեման։
(4) Միապտույտ մագնիսական հոսքը հավասար է մագնիսաշարժիչ ուժի և մագնիսական դիմադրության հարաբերակցությանը։ Հետևաբար, որքան մեծ է մագնիսաշարժիչ ուժը, այնքան փոքր է մագնիսական դիմադրությունը մագնիսական հոսքի ուղղությամբ և այնքան մեծ է հակադարձ էլեկտրամագնիսական դաշտը։
(5) Մագնիսական դիմադրությունը կապված է օդային ճեղքի և բևեռ-ճեղքի համակարգման հետ։ Որքան մեծ է օդային ճեղքը, այնքան մեծ է մագնիսական դիմադրությունը և այնքան փոքր է հետադարձ էլեկտրամագնիսական դաշտը։ Բևեռ-ճեղքի համակարգումն ավելի բարդ է և պահանջում է հատուկ վերլուծություն։
(6) Մագնիսաշարժիչ ուժը կապված է մագնիսի մնացորդային մագնիսականության և մագնիսի արդյունավետ մակերեսի հետ։ Որքան մեծ է մնացորդային մագնիսականությունը, այնքան բարձր է հետադարձ էլեկտրամագնիսական դաշտը։ Արդյունավետ մակերեսը կապված է մագնիսացման ուղղության, մագնիսի չափի և դիրքի հետ և պահանջում է հատուկ վերլուծություն։
(7) Մնացորդային մագնիսականությունը կապված է ջերմաստիճանի հետ։ Որքան բարձր է ջերմաստիճանը, այնքան փոքր է հետադարձ էլեկտրամագնիսական դաշտը։
Ամփոփելով՝ հետադարձ էլեկտրամագնիսական դաշտին ազդող գործոններն են՝ պտտման արագությունը, մեկ անցքի վրա պտույտների քանակը, փուլերի քանակը, զուգահեռ ճյուղերի քանակը, լրիվ և կարճ քայլը, շարժիչի մագնիսական շղթան, օդային բացվածքի երկարությունը, բևեռ-անցք համապատասխանությունը, մագնիսական պողպատի մնացորդային մագնիսականությունը, մագնիսական պողպատի տեղադրումը և չափը, մագնիսական պողպատի մագնիսացման ուղղությունը և ջերմաստիճանը։
5. Ինչպե՞ս ընտրել հետադարձ էլեկտրաշարժիչ ուժի չափը շարժիչի նախագծման մեջ։
Էլեկտրաշարժիչի նախագծման մեջ հետադարձ էլեկտրամագնիսական դաշտը (ԷԼԴ) շատ կարևոր է: Եթե հետադարձ էլեկտրամագնիսական դաշտը լավ է նախագծված (համապատասխան չափս, ցածր ալիքային աղավաղում), ապա շարժիչը լավն է: Հետադարձ էլեկտրամագնիսական դաշտը մի քանի հիմնական ազդեցություն ունի շարժիչի վրա.
1. Հակադարձ էլեկտրամագնիսական դաշտի մեծությունը որոշում է շարժիչի թույլ մագնիսական կետը, իսկ թույլ մագնիսական կետը՝ շարժիչի արդյունավետության քարտեզի բաշխումը։
2. Հակադարձ էլեկտրամագնիսական դաշտի աղավաղման արագությունը ազդում է շարժիչի ալիքային պտտող մոմենտի և ելքային պտտող մոմենտի հարթության վրա, երբ շարժիչը աշխատում է։
3. Հակադարձ էլեկտրամագնիսական ներուժի մեծությունը անմիջապես որոշում է շարժիչի պտտող մոմենտի գործակիցը, և հակադարձ էլեկտրամագնիսական ներուժի գործակիցը համեմատական է պտտող մոմենտի գործակցին։
Դրանից կարելի է ստանալ շարժիչի նախագծման հետևյալ հակասությունները.
ա. Երբ հետադարձ էլեկտրամագնիսական ներուժը մեծ է, շարժիչը կարող է պահպանել բարձր պտտող մոմենտ կարգավորիչի սահմանային հոսանքի տակ՝ ցածր արագության աշխատանքային տարածքում, բայց այն չի կարող արտադրել պտտող մոմենտ բարձր արագությամբ և նույնիսկ չի կարող հասնել սպասվող արագությանը։
բ. Երբ հետադարձ էլեկտրամագնիսական ներուժը փոքր է, շարժիչը դեռևս ունի ելքային հզորություն բարձր արագության տիրույթում, բայց պտտող մոմենտը չի կարող ստացվել նույն կարգավորիչի հոսանքով ցածր արագությամբ։
6. Հակադարձ էլեկտրամագնիսական դաշտի դրական ազդեցությունը մշտական մագնիսով շարժիչների վրա։
Հակադարձ էլեկտրամագնիսական դաշտի առկայությունը շատ կարևոր է մշտական մագնիսով շարժիչների աշխատանքի համար։ Այն կարող է շարժիչներին բերել որոշ առավելություններ և հատուկ գործառույթներ.
ա. Էներգախնայողություն
Մշտական մագնիսով շարժիչների կողմից առաջացած հակադարձ էլեկտրամագնիսական դաշտը կարող է նվազեցնել շարժիչի հոսանքը, դրանով իսկ նվազեցնելով հզորության կորուստը, նվազեցնելով էներգիայի կորուստը և հասնելով էներգախնայողության նպատակին։
բ. Մեծացնել պտտող մոմենտը
Հակադարձ էլեկտրամագնիսական դաշտը (ԷՄԴ) հակառակ է սնուցման աղբյուրի լարմանը։ Երբ շարժիչի արագությունը մեծանում է, հակադարձ էլեկտրամագնիսական դաշտը նույնպես մեծանում է։ Հակադարձ լարումը կնվազեցնի շարժիչի փաթույթի ինդուկտիվությունը, ինչը կհանգեցնի հոսանքի աճի։ Սա թույլ է տալիս շարժիչին առաջացնել լրացուցիչ պտտող մոմենտ և բարելավել շարժիչի հզորության ցուցանիշները։
գ. Հակադարձ դանդաղեցում
Հակադարձ էլեկտրամագնիսական դաշտի գոյության պատճառով մշտական մագնիսով շարժիչի հզորությունը կորցնելուց հետո այն կարող է շարունակել առաջացնել մագնիսական հոսք և ստիպել ռոտորին շարունակել պտտվել, ինչը ձևավորում է հակադարձ էլեկտրամագնիսական դաշտի հակադարձ արագության էֆեկտը, որը շատ օգտակար է որոշ կիրառություններում, ինչպիսիք են հաստոցները և այլ սարքավորումները։
Ամփոփելով՝ հետադարձ էլեկտրամագնիսական լարումը մշտական մագնիսով շարժիչների անփոխարինելի տարր է։ Այն բազմաթիվ առավելություններ է բերում մշտական մագնիսով շարժիչներին և շատ կարևոր դեր է խաղում շարժիչների նախագծման և արտադրության մեջ։ Հետադարձ էլեկտրամագնիսական լարման չափը և ալիքի ձևը կախված են այնպիսի գործոններից, ինչպիսիք են մշտական մագնիսով շարժիչի նախագծումը, արտադրության գործընթացը և օգտագործման պայմանները։ Հետադարձ էլեկտրամագնիսական լարման չափը և ալիքի ձևը կարևոր ազդեցություն ունեն շարժիչի աշխատանքի և կայունության վրա։
«Անհուի Մինգտենգ» մշտական մագնիսով էլեկտրամեխանիկական սարքավորումների ընկերություն, ՍՊԸ (https://www.mingtengmotor.com/)մշտական մագնիսով սինխրոն շարժիչների պրոֆեսիոնալ արտադրող է: Մեր տեխնիկական կենտրոնն ունի ավելի քան 40 գիտահետազոտական և զարգացման աշխատակից, որոնք բաժանված են երեք բաժնի՝ նախագծման, մշակման և փորձարկման, որոնք մասնագիտանում են մշտական մագնիսով սինխրոն շարժիչների հետազոտությունների և զարգացման, նախագծման և գործընթացային նորարարության մեջ: Մասնագիտական նախագծման ծրագրակազմի և ինքնուրույն մշակված մշտական մագնիսով շարժիչների հատուկ նախագծման ծրագրերի միջոցով, շարժիչի նախագծման և արտադրության գործընթացում, հետադարձ էլեկտրաշարժիչ ուժի չափը և ալիքի ձևը ուշադիր կքննարկվեն՝ համաձայն օգտագործողի իրական կարիքների և կոնկրետ աշխատանքային պայմանների՝ շարժիչի աշխատանքը և կայունությունն ապահովելու և շարժիչի էներգաարդյունավետությունը բարելավելու համար:
Հեղինակային իրավունք. Այս հոդվածը WeChat հանրային համարի «电机技术及应用» վերատպումն է, բնօրինակ հղումը https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
Այս հոդվածը չի արտացոլում մեր ընկերության տեսակետները։ Եթե դուք ունեք տարբեր կարծիքներ կամ տեսակետներ, խնդրում ենք ուղղել մեզ։
Հրապարակման ժամանակը. Օգոստոսի 20-2024